GPS tracker with SMS messaging
The team at UvA-BiTS was busy in 2014 developing a new type of GPS tracking device, and on 15 May 2015, a protoype was fitted on a spoonbill. The tracker has the same functionality as all other UvA-BiTS trackers, but in addition it is able to send SMS messages about the bird’s location. The SMS is not replacing the downloading of data with the base station and relay network, but is only meant to send a few GPS locations per day.
This new SMS messaging functionality can be very useful if a bird disperses beyond the reach of the antenna network, like Ronny did. Three years after tagging, Ronny was spotted by a birder about 140 km away from the location where he was released, and with this information Ben Koks of Werkgroep Grauwe Kiekendief was able to find the bird and download all its data at its nest. Without the information provided by the birder, we would never have known where to find the bird. Now with the new GPS-SMS feature, you can locate your bird outside the network. When your bird dies or when it loses its tracker, you may even be able to find the tracker back if it is within the reach of the GSM antenna network. Because sending an SMS needs considerable power, it is not possible to have the SMS function on the 2C-trackers, but only on the 5C and 6C trackers with batteries of at least 220 mAh. The weight is 5 gram extra for the 5CDLeGSM and 4 gram extra for the 6CDLeGSM.
The programming of the SMS is rather flexible, allowing a certain number of messages to be sent per day with 3 or 4 positions in each message. A time block allows you to start and stop the messages at selected days. All GPS positions that are sent by SMS are automatically uploaded to the database.
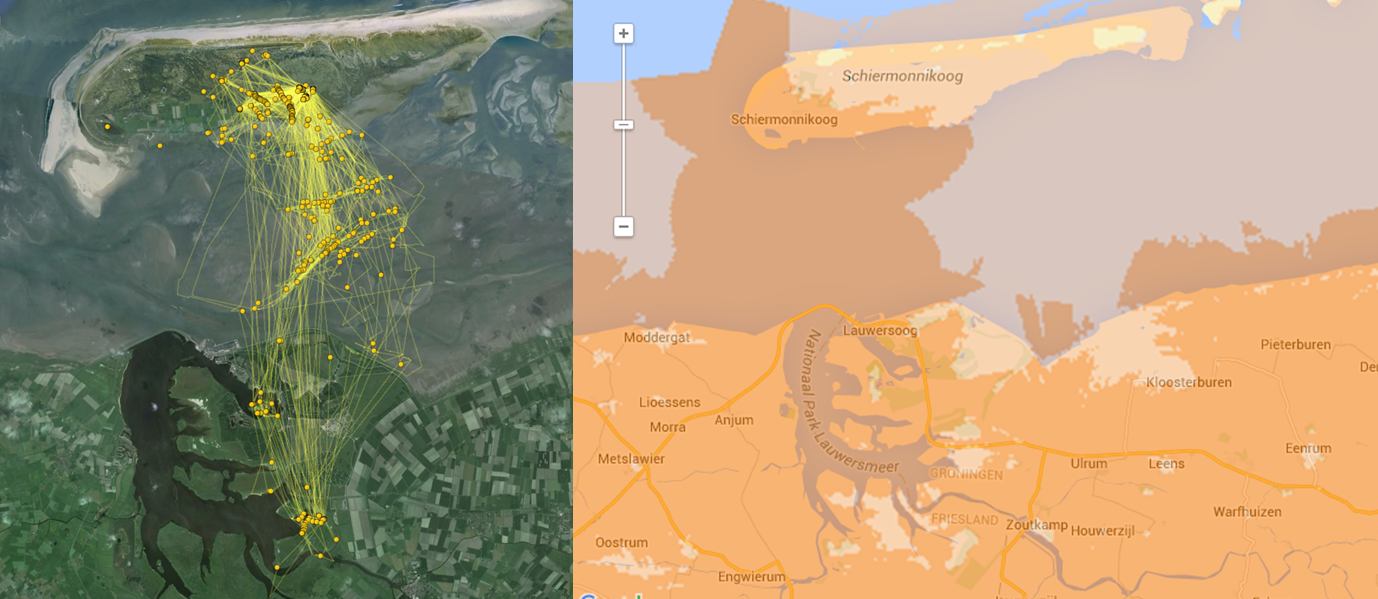
Spoonbill 1606 is a male that was caught on the nest on Schiermonnikoog Island on the coast of the Netherlands and tagged by Petra de Goeij and Theunis Piersma. It stayed on Schiermonnikoog and around the Lauwersmeer until 8 September. Fig 1A shows its whereabouts and the locations where it has sent SMS messages. Figure 1B shows the coverage of the antenna network around the island. It is clear that messages were also sent where the coverage was not optimal.
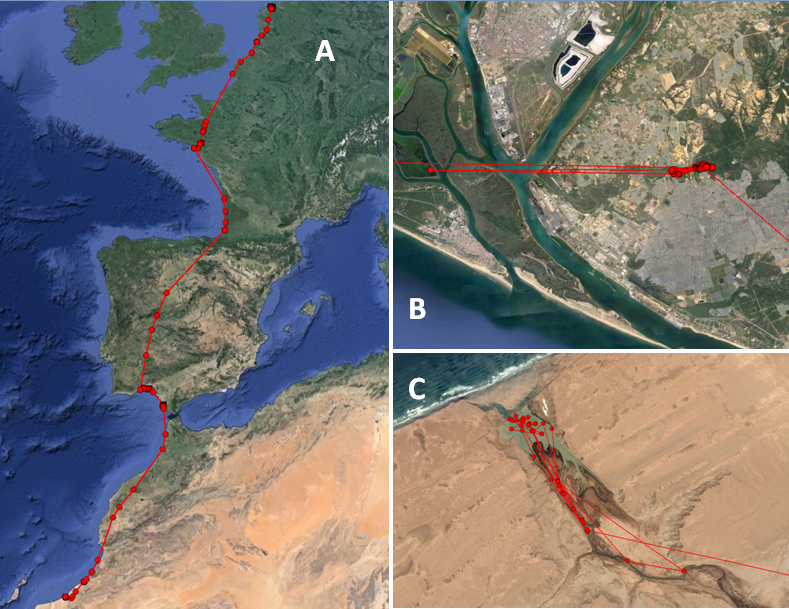
On the 8th of September it started its winter migration, and after some stopovers in Zeeland and Bretagne it reached the south coast of Spain where it seemed to have a good time in one of the tidal rivers right in between greenhouses with strawberries. On the 15th of October it left Spain and headed to the south of Morocco.